Theme: Application of Artificial Intelligence
Artificial Intelligence Congress 2019
Conference Series llc ltd welcomes you to attend the Annual Congress on Artificial Intelligence and Advanced Robotics during January 30-31, 2019 at Bangkok, Thailand. We cordially invite all the participants who are interested in sharing their knowledge and research in the arena of Artificial Intelligence Congress 2019. This Conference allows participants to discuss AI through effective use of various techniques and advancements.
What is Artificial intelligence?
Artificial intelligence (AI) is a branch of computer science that aims to create intelligent machines. It has become an essential part of the technology industry. Artificial intelligence, is also called as machine intelligence, is intelligence demonstrated by machines.
It is an area of computer science that emphasizes the creation of intelligent machines that work and reacts like humans and also makes it possible for machines to learn from experience, adjust to new inputs. Some of the activities computers with artificial intelligence are designed for include:
- Speech recognition
- Learning
- Planning
- Problem solving
What will you learn?
You'll get to gain on emerging techniques and technologies by the analysis of case studies, develop technical skills through workshops, share emerging practices in AI and future trends.
- Industry Vertical Use Cases ( Where AI applications are working/not working, What hot Technologies are used to implement AI, How to develop AI applications etc..)
- Cognitive Computing
- Chatbot
- Data Science, Machine Learning & Deep Learning
- IoT
- Security
- NLP
- Computer Vision
- Home Assistant
- Robotics
- Neural networks
- Data Mining and Data Analytics
- Speech Recognition,
- Image processing,
- Unsupervised Learning
- Workshops
Track 1. Artificial Intelligence
Artificial intelligence is a branch of computer science that aims to create intelligent machines. It has become an essential part of the technology industry.
Research associated with artificial intelligence is highly technical and specialized. The core problems of artificial intelligence include programming computers for certain traits such as:
• Knowledge
• Reasoning
• Problem solving
• Perception
• Learning
• Planning
• Ability to manipulate and move objects
Track 2. Robotic Automation and Outsourcing
Robotic process automation (or RPA) is an emerging form of business process automation technology based on the notion of software robots or artificial intelligence (AI) workers.
In traditional workflow automation tools, a software developer produces a list of actions to automate a task and interface to the back-end system using internal application programming interfaces (APIs) or dedicated scripting language. In contrast, RPA systems develop the action list by watching the user perform that task in the application's graphical user interface (GUI), and then perform the automation by repeating those tasks directly in the GUI. This can lower the barrier to use of automation in products that might not otherwise feature APIs for this purpose.
RPA tools have strong technical similarities to graphical user interface testing tools. These tools also automate interactions with the GUI, and often do so by repeating a set of demonstration actions performed by a user. RPA tools differ from such systems including features that allow data to be handled in and between multiple applications, for instance, receiving email containing an invoice, extracting the data, and then typing that into a bookkeeping system.
Track 3. Robot Localization and Map Building
Localization and mapping are the essence of successful navigation in mobile platform technology. Localization is a fundamental task in order to achieve high levels of autonomy in robot navigation and robustness in vehicle positioning. Robot localization and mapping is commonly related to cartography, combining science, technique and computation to build a trajectory map that reality can be modelled in ways that communicate spatial information effectively. This book describes comprehensive introduction, theories and applications related to localization, positioning and map building in mobile robot and autonomous vehicle platforms. Each chapter is rich with different degrees of details and approaches, supported by unique and actual resources that make it possible for readers to explore and learn the up to date knowledge in robot navigation technology. Understanding the theory and principles described in this book requires a multidisciplinary background of robotics, nonlinear system, sensor network, network engineering, computer science, physics, etc.
Track 4. Screw Theory for Robotics
Robots are commonly modeled as a multi-body system, that is, a set of rigid bodies connected by joints. For instance, the mechanical structure of today's humanoid robots is a kinematic tree of cylindrical joints, with the root of the tree at the (rigid body corresponding to the) waist of the robot, and one branch for each limb, left leg, right leg, etc. Motors located in each joint produce torques, which in turn generate a chain of forces between the rigid bodies of the kinematic chain until end-effectors, hands or feet. If the end-effector is free (like a hand in the air), it will perform a pure motion. If it is in contact (like a foot firmly planted on the ground), it will not move directly, but the interaction with the environment will produce contact forces that in turn move the location of the humanoid in space via the Newton-Euler equations of motion. This phenomenon is central to locomotion, and it can be studied, like all rigid-body motions, using the framework of screw theory.
Screws
The motion of any rigid body is fully described by a mathematical object called a screw, also known as spatial vectors (there may be a subtle difference between these two concepts but I don't understand it for now). A screw sO=(r,mO)sO=(r,mO) is given by:
• its resultant rr, a vector, and
• its moment mOmO, a vector field over the Euclidean space E3E3.
The resultant rr is the same everywhere, but the moment mOmO depends on the point O∈E3O∈E3 where it is taken. However, the moment field has a particular structure: from mOmO and rr, the moment at any other point P∈E3P∈E3 is given by the Varignon formula:
mP = mO+PO−→−×r.mP = mO+PO→×r.
Although the coordinate vector sPsP of a screw depends on the point PP where it is taken, the screw itself does not depend on the choice of PP as a consequence of this formula. There is therefore a distinction to make between the screw itself and its coordinate vector at a given point. A common convention is to denote screws with hats s^s^ and their coordinates with point subscripts sOsO.
Track 5. Robot Manipulators: Trends and Development
Robot-based automation has gained increasing deployment in industry. Typical application
examples of industrial robots are material handling, machine tending, arc welding, spot
welding, cutting, painting, and gluing. A robot task normally consists of a sequence of the
robot tool center point (TCP) movements. The time duration during which the sequence of
the TCP movements is completed is referred to as cycle time. Minimizing cycle time implies
increasing the productivity, improving machine utilization, and thus making automation
affordable in applications for which throughput and cost effectiveness is of major concern.
Considering the high number of task runs within a specific time span, for instance one year,the importance of reducing cycle time in a small amount such as a few percent will be more understandable.
Track 6. Mobile Robots: Towards New Applications
A mobile robot is a robot that is capable of locomotion. Mobile robotics is usually considered to be a subfield of robotics and information engineering.
A spying robot is an example of a mobile robot capable of movement in a given environment.
Track 7. Mobile Robots
Mobile robots have the capability to move around in their environment and are not fixed to one physical location. Mobile robots can be "autonomous" (AMR - autonomous mobile robot) which means they are capable of navigating an uncontrolled environment without the need for physical or electro-mechanical guidance devices. Alternatively, mobile robots can rely on guidance devices that allow them to travel a pre-defined navigation route in relatively controlled space (AGV - autonomous guided vehicle). By contrast, industrial robots are usually more-or-less stationary, consisting of a jointed arm (multi-linked manipulator) and gripper assembly (or end effector), attached to a fixed surface.
Mobile robots have become more commonplace in commercial and industrial settings. Hospitals have been using autonomous mobile robots to move materials for many years. Warehouses have installed mobile robotic systems to efficiently move materials from stocking shelves to order fulfillment zones. Mobile robots are also a major focus of current research and almost every major university has one or more labs that focus on mobile robot research. Mobile robots are also found in industrial, military and security settings. Domestic robots are consumer products, including entertainment robots and those that perform certain household tasks such as vacuuming or gardening.
Track 8. Service Robot Applications
Service robots assist human beings, typically by performing a job that is dirty, dull, distant, dangerous or repetitive, including household chores. They typically are autonomous and/or operated by a built-in control system, with manual override options. The term "service robot" does not have a strict technical definition. The International Organization for Standardization defines a “service robot” as a robot “that performs useful tasks for humans or equipment excluding industrial automation applications”.
According to ISO 8373 robots require “a degree of autonomy”, which is the “ability to perform intended tasks based on current state and sensing, without human intervention”. For service robots this ranges from partial autonomy - including human robot interaction - to full autonomy - without active human robot intervention. The International Federation of Robotics (IFR) statistics for service robots therefore include systems based on some degree of human robot interaction or even full tele-operation as well as fully autonomous systems.
Service robots are categorized according to personal or professional use. They have many forms and structures as well as application areas.
Track 9. Humanoid Robots: New Developments
A humanoid robot is a robot with its body shape built to resemble the human body. The design may be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of al locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some forms of humanoid robots may model only part of the body, for example, from the waist up. Some humanoid robots also have heads designed to replicate human facial features such as eyes and mouths. Androidsare humanoid robots built to aesthetically resemble humans.
Track 10. Automated Bio-Technology
Automation in the life sciences is always associated with interdisciplinary cooperation: experts from the most diverse disciplines need to maintain a constant dialogue to be able to work together successfully – engineers and technicians from the fields of systems and mechanical engineering with life sciences experts, and if the particular product under development requires, medical professionals can also become involved. Life sciences experts and medical professionals bring in the know-how on how to deal correctly with biomaterials and living systems. An example relating to the bioproduction of fine chemicals clearly shows how important this sharing of knowledge and cooperation between experts is. Large-scale industrial production can only become competitive through the implementation of automated production processes, which is however only possible with organisms that can be adapted to large-scale production. This in turn requires experts with highly specialised knowledge about the metabolism of the production organisms used and the tools that allow processes to be adapted to the industrial scale.
Track 11. Medical robots and Biotechnology
Robotics in the healthcare and pharmaceutical sector has a relatively long history, having started with a robot called the Puma 560 in 1985, according to All About Robotic Surgery.
Now, however, a number of robotic and automation systems have been approved by the US Food and Drug Administration for operation in healthcare environments, and the market is probably set to grow exponentially in the next few years as they become fully commercialized.
While robotic surgery systems such as Intuitive Surgical’s da Vinci may be the most photogenic of the systems, gaining a lot of publicity in recent years, there are numerous other systems being developed, with some already being used in healthcare.
Midea, the home appliances giant, is considering launching something similar, although no pictures or details of its robot pharmacist have yet emerged.
But there is quite a lot of activity in the sector, which is why we thought we’d round up the companies which are either ready to launch robotic healthcare systems or have already introduced them.
Importance and Scope:
Due to unpredictable technology development, the industries are trying to reduce man power where they trying to increase automation function in various sectors. Now automation is used in each and every company where machines are involved and some or other process is involved. Many fields like robotics, mechatronics, control systems, electronics, wireless, laser technology, automotive motors are depended only on this Automation functions. The conference organizers aim is to gather the researcher’s academicians and scientists from the field of Industrial Automation community and to create an approach towards global exchange of information on technological advances, new scientific innovations, and the effectiveness of various regulatory programs towards industrial automation.
Why Bangkok, Thailand?
Bangkok certainly lives up to its reputation as a travel hot spot in Southeast Asia. The 'City of Angels' has funky markets, upmarket malls, a riverside full of surprises, a vibrant nightlife scene, many fabulous sights and attractions that reflect its unique heritage, and much more.
Bangkok is a city of contrasts with action at every turn; marvel at the gleaming temples, catch a tuk-tuk along the bustling Chinatown or take a longtail boat through floating markets. Food is another Bangkok highlight, from local dishes served at humble street stalls to haute cuisine at romantic rooftop restaurants.
Bangkok is Thailand’s national capital and the biggest city. Bangkok is the monetary and social focus and has one of Southeast Asia’s most prominent ports and terminals. It is a standout amongst the most gainful rice developing districts in Asia. It additionally has the number of sugar factories and material businesses. The vast majority of the exchange is done through a port of Bangkok in Thailand. There are more than 400 Buddhist sanctuaries which are called as wats. The sanctuary of Emerald Buddha in fabulous royal residence is generally celebrated. Bangkok is the most swarmed city with sanctuaries, Industries, and shops. It is the real vacationer spot noted for social attractions. Because of the nearness of stream Chao Phraya, there are numerous characteristic and manufactured waterways that join different areas of the place. Because of waterways and conduits, Bangkok, Thailand is called as Venice of the East. The vital vacationer puts in Bangkok, Thailand are a terrific castle, historical centers and Victoria landmark and wat pho sanctuary. There are the number of colleges with magnificent scholarly measures and present-day offices a portion of the colleges incorporate University of Bangkok, Thailand Metropolis, Chulalongkorn University, Ramkhamhaeng University and Srinakharinwirot University.
Conference Highlights:
- Robotic Automation and Outsourcing
- Robot Localization and Map Building
- Screw Theory for Robotics
- Remote and Tele robotics
- Robot Manipulators: Trends and Development
- Mobile Robots: Towards New Applications
- Service Robot Applications
- Multi Robot Systems
- New Approaches in Automation and Robotics
- Humanoid Robots: New Developments
- Automation Control
- Bio inspiration and Robotics: Walking and Climbing Robots
Why to attend???
With members from around the world focused on learning about automation technologies, this is your single best opportunity to reach the largest assemblage of participants from the Automation community. Conduct demonstrations, distribute information, acquire knowledge about current and trending automation technologies, make a splash with a new research, and receive name recognition at this 3-day event. World-renowned speakers, the most recent techniques, tactics, and the newest updates in Industrial Automation fields are hallmarks of this conference.
Target Audience:
- Automation and Robotics Lab Directors/Associates
- Head of the Departments from the field of Automation, Robotics, Mechatronics, Control systems
- CEO’s of the Automation manufacturing Companies
- Automation researchers and academicians
- Automation doctorates
- Control systems and Mechatronics expertise
- Professors and Students from Academia in the study of Industrial Automation and Robotics field.
Major Automation and Robotics Societies around the Globe
- International Society of Automation (ISA)
- Robotics and Automation Society
- Measurement, Control & Automation Society
- Association for Laboratory Automation-UK
- Association for Standardization of Automation and Measuring Systems-Germany
Major Automation Societies in USA
- American Automatic Control Council (AACC)
- Instrumentation, Systems, and Automation Society (ISA)
- Association for Laboratory Automation (ALA)
- Automated Imaging Association (AIA)
- Robotics and Automation Society
- Society of Home Automation technologies
- EDA Consortium automation Association
Global Artificial Intelligence Market Analysis & Trends
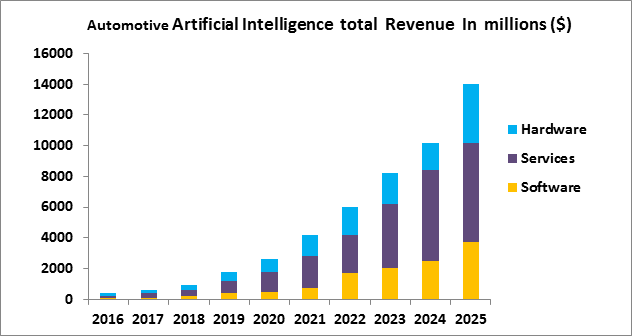
The Artificial Intelligence Market is poised to grow globally at a CAGR of around 44.3% over the next decade to reach approximately $23.4 billion by 2025. This industry report analyzes the global markets for Artificial Intelligence across all the given segments on global as well as regional levels presented in the research scope. It represents market data for 2013, 2014 revenue estimations are presented for 2015 and forecasts from 2016 till 2025.
The Artificial Intelligence market in Western Europe education sector to grow at a CAGR of 38.37% during the period 2017-2021, the education system in Europe is gradually adopting e-learning and other related tools such as social learning. The institutions are integrating social media into another platform to facilitate learning, information sharing, and collaboration among students and teachers. These kinds of social networking platform are offered by software solutions such as next-gen LMS.
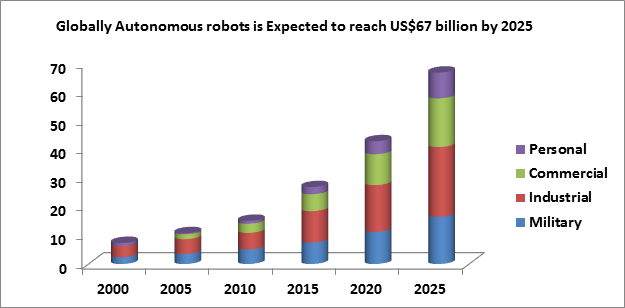
The market of autonomous robots is growing rapidly be it for industrial, military, commercial or consumer applications. In 2005 spending on robotic systems were US $11 billion but by 2025 it is expected to rise to $67 billion. Decades ago industrial robots began transforming manufacturing. With their mechanical, programmable arms, they performed tasks such as painting, welding and placing objects. Today’s autonomous robots are more efficient and time-saving. The BCG estimates that more than $67 billion will be spent globally in the robotics sector by 2025.Companies are investing an enormous amount of time, capital, and manpower to produce software solutions with embedded AI applications and other AI-backed products such as an intelligent tutor. In order to improve AI capabilities of present solutions, extensive research and R&D investments are still being conducted.
Artificialintelligence 2017
Thanks to all of our wonderful speakers, conference attendees, Automation and Robotics-2017 Conference were the best!
The 3rd International Conference on Artificial Intelligence and Robotics, hosted by the ME Conferences were held during June 28-29, 2017 at Hilton San Diego Mission Valley Hotel, San Diego, USA with the theme “Future Trends in the Field of Industrial Automation and Robotics". Benevolent response and active participation were received from the Editorial Board Members of ME Conference Group Journals as well as from the scientists, engineers, researchers, students, and leaders from the fields of Automation and Robotics, who made this event successful.
The meeting was carried out through various sessions, in which the discussions were held on the following major scientific tracks:
- New Approaches in Automation and Robotics
- Machine Learning
- Quest for Artificial Intelligence
- Remote and Telerobotics
- Automation Control
- Prototypical Applications
- Humanoid Robots: New Developments
- Computational creativity
- Affective computing
- Robot Localization and Map Building
- Automation Control
- Robot Manipulators: Trends and Development
New Approaches to Automation and Robotics The conference was initiated with a series of lectures delivered by both Honorable Guests and members of the Keynote forum. The list included:
Ashitey Trebi-Ollennu, NASA Jet Propulsion Laboratory, USA
Lin Zhou, IBM, USA
Timothy Sands, Naval Post Graduate School, USA
Bogdan Gabrys, Bournemouth University, UK
Mikhail Moshkov, King Abdullah University of Science and Technology (KAUST), Saudi Arabia
Jose B. Cruz Jr, National Academy of Science and Technology, Philippines
Fuchiang (Rich) Tsui, University of Pittsburgh School of Medicine, USA
Ryspek Usubamatov, Kyrgyz Technical University, Kyrgyzstan
Conference Highlights
- Track 1. Artificial Intelligence
- Track 2. Robotic Automation and Outsourcing
- Track 3. Robot Localization and Map Building
- Track 4. Screw Theory for Robotics
- Track 5. Robot Manipulators: Trends and Development
- Track 6. Mobile Robots: Towards New Applications
- Track 7. Mobile Robots
- Track 8. Service Robot Applications
- Track 9. Humanoid Robots: New Developments
- Track 10. Automated Bio-Technology
- Track 11. Medical robots and Biotechnology
To share your views and research, please click here to register for the Conference.
To Collaborate Scientific Professionals around the World
| Conference Date | Jan 30-31, 2019 | ||
| Sponsors & Exhibitors |
|
||
| Speaker Opportunity Closed | |||
| Poster Opportunity Closed | Click Here to View | ||
Useful Links
Special Issues
All accepted abstracts will be published in respective Our International Journals.
Abstracts will be provided with Digital Object Identifier by